Multi-touch force & position sensing with Arduino
Time for the moment of truth... Were we able to improve that lackluster 17Hz scan rate?
Let's take another look on the scope, using the same time/div settings as last time:
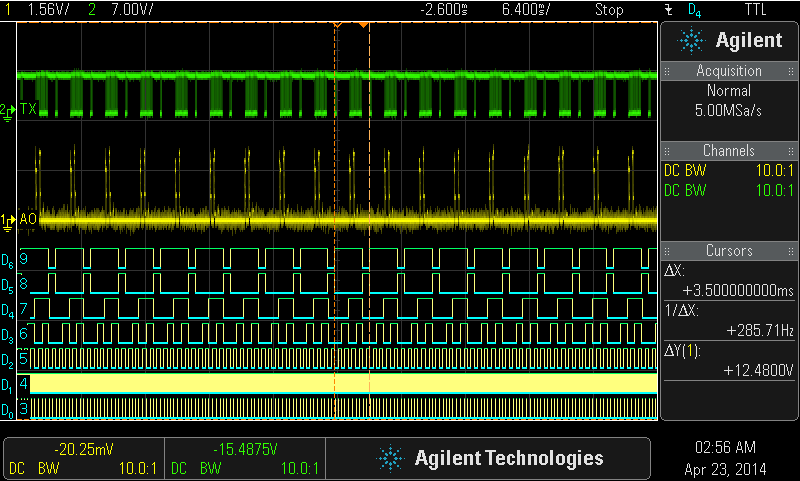
Framing a single scan cycle with the cursors, we observe that a typical scan now completes in 3.5msec - a 285Hz update rate. Not bad!
Now that we're up to a more usable speed, let's finish by adding some graphic feedback on the PC end.